





Product Center
Pre Water Treatment System
PET Bottle Blowing Series
Filling Series
BFC 3 in 1 Machine
Labeler
Shrink Wrapping Machine Series
Wrap Around Case Packer Series
Carton Erector Series
Carton Sealer Series
Carton Packer/Unpacker
Palletizer Series
Depalletizer Series
Packaging Robots
Online Inspecting Device
Conveying System of Production Line
DELTA3 Robot
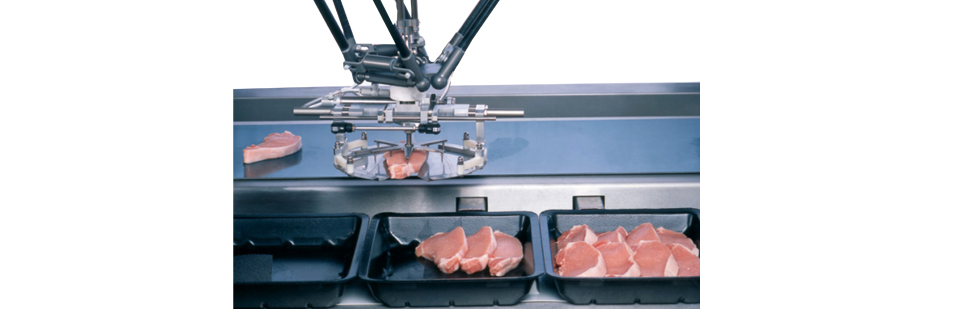
With 3 space freedom degree and 1 rotate one, Delta Robot or Parallel Robot grasp objects through instructing programm or visiual system and realize quick operations such as pick, sort, pack, move etc. by confirming the position of TCP via three servo motors. Characterized by light, small, rapid, precise, low cost and high efficiency, the Robot is used in dairy products, food, drugs and mecha.
Equipment features
The Delta Robot is typical of spacial three freedom degree parallel structure, and the precise and compact structure endows it with the following features:
1. Strong bearing, good dynamic performance
2. Three freedom degree structure, high repositioning precision
3. Picking in superspeed, multi beats a second.
1. Strong bearing, good dynamic performance
2. Three freedom degree structure, high repositioning precision
3. Picking in superspeed, multi beats a second.
Application system
The application system of Delta Robot consists of three parts, i.e, robot, conveying line and robotic insrallation frame.
The robot is made up of base plate, engine cover, rotary axis, main mechanical arm, deputy mechanical arm and gripper center. 
The robot is made up of base plate, engine cover, rotary axis, main mechanical arm, deputy mechanical arm and gripper center.
Working range
The working range of the Delta Robot is determined by the length of main and deputy mechanical arms, the semi-diameter of dynamic and static platform, and the angle range of main arm activity. Take the Delta Robot with 3 kg load for an example:

The colored ares=actual working range, i.e, the max. Working Space inside the cylinder. Working space can be shrinked according to the x-y-z coordinate.
The colored ares=actual working range, i.e, the max. Working Space inside the cylinder. Working space can be shrinked according to the x-y-z coordinate.
Technical data of Delta Robot
File download
| File NameпјҡдёҮдё–еҫ·иңҳиӣӣжүӢжңәеҷЁдәә.pdf | File formatпјҡpdf | File sizeпјҡ1.47 MB | Download |
Video